Reactor models frequently reduce to systems of ordinary differential equations (ODEs). For batch reactors and plug-flow reactors all spatial gradients vanish or are replaced by the residence time coordinate. This notebook demonstrates how to formulate and solve such models using explicit and implicit methods in Python.
Governing equations¶
A multicomponent reacting system with species and reactions:
where is the stoichiometric matrix, the vector of reaction rates, and the heat of reaction .
The stoichiometric matrix encodes mass conservation; each column sums to zero for closed systems.
Forward (explicit) Euler — first-order, conditionally stable:
Backward (implicit) Euler — first-order, unconditionally stable (A-stable):
The implicit step requires solving a nonlinear system at each time level.
PyMRM building blocks¶
| Function / module | Role |
|---|---|
scipy.integrate.solve_ivp | Adaptive Runge–Kutta integration (BDF for stiff systems) |
pymrm.NumJac | Finite-difference Jacobian approximation |
pymrm.newton | Newton–Raphson solver for nonlinear systems |
numpy stoichiometric matrix | Encodes reaction network; nu @ r(c) gives rate vector |
Example 1 — Consecutive reactions A → B → C in a batch reactor¶
Parameters: , , .
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
k1, k2 = 1.0, 0.5 # rate constants [1/s]
nu = np.array([[-1, 0], # stoichiometric matrix (nc x nr)
[ 1,-1],
[ 0, 1]])
def rates(c): return np.array([k1*c[0], k2*c[1]])
def rhs(t, c): return nu @ rates(c)
c0 = np.array([1.0, 0.0, 0.0])
sol = solve_ivp(rhs, [0, 8], c0, dense_output=True, rtol=1e-8)
t = np.linspace(0, 8, 300)
C = sol.sol(t)
plt.figure(figsize=(6, 3.5))
for i, label in enumerate(['A', 'B', 'C']):
plt.plot(t, C[i], label=label)
plt.xlabel('Time (s)'); plt.ylabel('Concentration (mol/m³)')
plt.title('Batch reactor: A → B → C')
plt.legend(); plt.tight_layout(); plt.show()
print(f'Maximum B concentration: {C[1].max():.4f} at t = {t[C[1].argmax()]:.2f} s')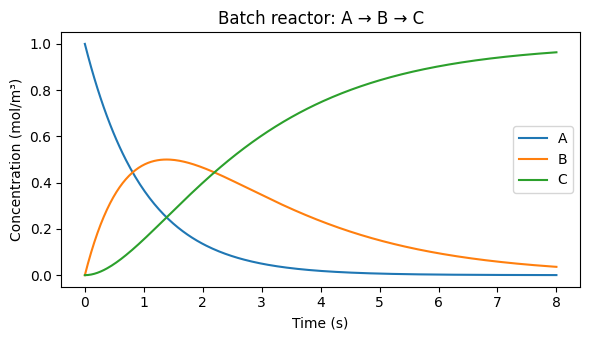
Maximum B concentration: 0.5000 at t = 1.39 s
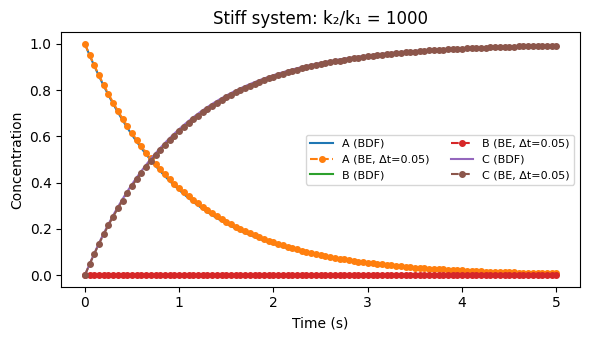
Example 2 — Stiff system: explicit vs implicit Euler¶
A stiff system has widely separated time scales. Here and to create stiffness. The explicit Euler method requires for stability, while backward Euler remains stable with much larger time steps.
from scipy import sparse
from pymrm import NumJac, newton
k1_s, k2_s = 1.0, 1000.0
nu_s = np.array([[-1, 0], [1, -1], [0, 1]])
def rhs_s(c): return nu_s @ np.array([k1_s*c[0], k2_s*c[1]])
# Backward Euler with Newton solve
dt = 0.05 # large step — stable for implicit, unstable for explicit
t_end = 5.0
t_be, c_be = [0.0], [np.array([1.0, 0.0, 0.0])]
c = c_be[0].copy()
t = 0.0
numjac = NumJac(c.shape)
while t < t_end - 1e-10:
c_old = c.copy()
def residual(c_new):
g = c_new - c_old - dt * rhs_s(c_new)
_, jac_rhs = numjac(rhs_s, c_new)
jac = sparse.eye(len(c_new), format='csc') - dt * jac_rhs
return g.reshape(-1, 1), jac
result = newton(residual, c.copy())
c = result.x.ravel()
t += dt; t_be.append(t); c_be.append(c.copy())
t_be = np.array(t_be)
c_be = np.array(c_be)
# Reference: solve_ivp (BDF)
sol_ref = solve_ivp(lambda t, c: rhs_s(c), [0, t_end],
[1.0, 0.0, 0.0], method='BDF', dense_output=True)
t_ref = np.linspace(0, t_end, 500)
C_ref = sol_ref.sol(t_ref)
fig, ax = plt.subplots(figsize=(6, 3.5))
for i, lab in enumerate(['A', 'B', 'C']):
ax.plot(t_ref, C_ref[i], lw=1.5, label=f'{lab} (BDF)')
ax.plot(t_be, c_be[:, i], 'o--', ms=4, label=f'{lab} (BE, Δt={dt})')
ax.set_xlabel('Time (s)'); ax.set_ylabel('Concentration')
ax.set_title(f'Stiff system: k₂/k₁ = {k2_s/k1_s:.0f}')
ax.legend(ncol=2, fontsize=8); plt.tight_layout(); plt.show()
Summary¶
| Method | Order | Stability | Recommended for |
|---|---|---|---|
| Forward Euler | 1 | Conditional () | Non-stiff, simple |
| Backward Euler | 1 | Unconditional (A-stable) | Stiff systems, moderate accuracy |
solve_ivp RK45 | 4/5 | Conditional (adaptive) | Non-stiff, high accuracy |
solve_ivp BDF | 1–5 | Stiff-safe (adaptive) | Stiff chemical kinetics |
Key insight: The stoichiometric matrix is the central data structure. Defining it once lets you swap reaction networks without rewriting the integrator.